Tutorial¶
For deep learning, this tutorial will walk you through building handwritten digits classifiers using the MNIST dataset, arguably the “Hello World” of neural networks. For reinforcement learning, we will let computer learns to play Pong game from the original screen inputs. For nature language processing, we start from word embedding, and then describe language modeling and machine translation.
This tutorial includes all modularized implementation of Google TensorFlow Deep Learning tutorial, so you could read TensorFlow Deep Learning tutorial as the same time [en] [cn] .
Note
For experts: Read the source code of InputLayer and DenseLayer, you
will understand how TensorLayer work. After that, we recommend you to read
the codes on Github directly.
Before we start¶
The tutorial assumes that you are somewhat familiar with neural networks and TensorFlow (the library which TensorLayer is built on top of). You can try to learn the basic of neural network from the Deeplearning Tutorial.
For a more slow-paced introduction to artificial neural networks, we recommend Convolutional Neural Networks for Visual Recognition by Andrej Karpathy et al., Neural Networks and Deep Learning by Michael Nielsen.
To learn more about TensorFlow, have a look at the TensorFlow tutorial. You will not need all of it, but a basic understanding of how TensorFlow works is required to be able to use TensorLayer. If you’re new to TensorFlow, going through that tutorial.
TensorLayer is simple¶
The following code shows a simple example of TensorLayer, see tutorial_mnist_simple.py .
We provide a lot of simple functions (like fit() , test() ), however,
if you want to understand the details and be a machine learning expert, we suggest you to train the network by using
TensorFlow’s methods like sess.run(), see tutorial_mnist.py for more details.
import tensorflow as tf
import tensorlayer as tl
sess = tf.InteractiveSession()
# prepare data
X_train, y_train, X_val, y_val, X_test, y_test = \
tl.files.load_mnist_dataset(shape=(-1,784))
# define placeholder
x = tf.placeholder(tf.float32, shape=[None, 784], name='x')
y_ = tf.placeholder(tf.int64, shape=[None, ], name='y_')
# define the network
network = tl.layers.InputLayer(x, name='input_layer')
network = tl.layers.DropoutLayer(network, keep=0.8, name='drop1')
network = tl.layers.DenseLayer(network, n_units=800,
act = tf.nn.relu, name='relu1')
network = tl.layers.DropoutLayer(network, keep=0.5, name='drop2')
network = tl.layers.DenseLayer(network, n_units=800,
act = tf.nn.relu, name='relu2')
network = tl.layers.DropoutLayer(network, keep=0.5, name='drop3')
# the softmax is implemented internally in tl.cost.cross_entropy(y, y_, 'cost') to
# speed up computation, so we use identity here.
# see tf.nn.sparse_softmax_cross_entropy_with_logits()
network = tl.layers.DenseLayer(network, n_units=10,
act = tf.identity,
name='output_layer')
# define cost function and metric.
y = network.outputs
cost = tl.cost.cross_entropy(y, y_, 'cost')
correct_prediction = tf.equal(tf.argmax(y, 1), y_)
acc = tf.reduce_mean(tf.cast(correct_prediction, tf.float32))
y_op = tf.argmax(tf.nn.softmax(y), 1)
# define the optimizer
train_params = network.all_params
train_op = tf.train.AdamOptimizer(learning_rate=0.0001, beta1=0.9, beta2=0.999,
epsilon=1e-08, use_locking=False).minimize(cost, var_list=train_params)
# initialize all variables in the session
tl.layers.initialize_global_variables(sess)
# print network information
network.print_params()
network.print_layers()
# train the network
tl.utils.fit(sess, network, train_op, cost, X_train, y_train, x, y_,
acc=acc, batch_size=500, n_epoch=500, print_freq=5,
X_val=X_val, y_val=y_val, eval_train=False)
# evaluation
tl.utils.test(sess, network, acc, X_test, y_test, x, y_, batch_size=None, cost=cost)
# save the network to .npz file
tl.files.save_npz(network.all_params , name='model.npz')
sess.close()
Run the MNIST example¶

In the first part of the tutorial, we will just run the MNIST example that’s included in the source distribution of TensorLayer. MNIST dataset contains 60000 handwritten digits that is commonly used for training various image processing systems, each of digit has 28x28 pixels.
We assume that you have already run through the Installation. If you
haven’t done so already, get a copy of the source tree of TensorLayer, and navigate
to the folder in a terminal window. Enter the folder and run the tutorial_mnist.py
example script:
python tutorial_mnist.py
If everything is set up correctly, you will get an output like the following:
tensorlayer: GPU MEM Fraction 0.300000
Downloading train-images-idx3-ubyte.gz
Downloading train-labels-idx1-ubyte.gz
Downloading t10k-images-idx3-ubyte.gz
Downloading t10k-labels-idx1-ubyte.gz
X_train.shape (50000, 784)
y_train.shape (50000,)
X_val.shape (10000, 784)
y_val.shape (10000,)
X_test.shape (10000, 784)
y_test.shape (10000,)
X float32 y int64
[TL] InputLayer input_layer (?, 784)
[TL] DropoutLayer drop1: keep: 0.800000
[TL] DenseLayer relu1: 800, relu
[TL] DropoutLayer drop2: keep: 0.500000
[TL] DenseLayer relu2: 800, relu
[TL] DropoutLayer drop3: keep: 0.500000
[TL] DenseLayer output_layer: 10, identity
param 0: (784, 800) (mean: -0.000053, median: -0.000043 std: 0.035558)
param 1: (800,) (mean: 0.000000, median: 0.000000 std: 0.000000)
param 2: (800, 800) (mean: 0.000008, median: 0.000041 std: 0.035371)
param 3: (800,) (mean: 0.000000, median: 0.000000 std: 0.000000)
param 4: (800, 10) (mean: 0.000469, median: 0.000432 std: 0.049895)
param 5: (10,) (mean: 0.000000, median: 0.000000 std: 0.000000)
num of params: 1276810
layer 0: Tensor("dropout/mul_1:0", shape=(?, 784), dtype=float32)
layer 1: Tensor("Relu:0", shape=(?, 800), dtype=float32)
layer 2: Tensor("dropout_1/mul_1:0", shape=(?, 800), dtype=float32)
layer 3: Tensor("Relu_1:0", shape=(?, 800), dtype=float32)
layer 4: Tensor("dropout_2/mul_1:0", shape=(?, 800), dtype=float32)
layer 5: Tensor("add_2:0", shape=(?, 10), dtype=float32)
learning_rate: 0.000100
batch_size: 128
Epoch 1 of 500 took 0.342539s
train loss: 0.330111
val loss: 0.298098
val acc: 0.910700
Epoch 10 of 500 took 0.356471s
train loss: 0.085225
val loss: 0.097082
val acc: 0.971700
Epoch 20 of 500 took 0.352137s
train loss: 0.040741
val loss: 0.070149
val acc: 0.978600
Epoch 30 of 500 took 0.350814s
train loss: 0.022995
val loss: 0.060471
val acc: 0.982800
Epoch 40 of 500 took 0.350996s
train loss: 0.013713
val loss: 0.055777
val acc: 0.983700
...
The example script allows you to try different models, including Multi-Layer Perceptron,
Dropout, Dropconnect, Stacked Denoising Autoencoder and Convolutional Neural Network.
Select different models from if __name__ == '__main__':.
main_test_layers(model='relu')
main_test_denoise_AE(model='relu')
main_test_stacked_denoise_AE(model='relu')
main_test_cnn_layer()
Understand the MNIST example¶
Let’s now investigate what’s needed to make that happen! To follow along, open up the source code.
Preface¶
The first thing you might notice is that besides TensorLayer, we also import numpy and tensorflow:
import tensorflow as tf
import tensorlayer as tl
from tensorlayer.layers import set_keep
import numpy as np
import time
As we know, TensorLayer is built on top of TensorFlow, it is meant as a supplement helping
with some tasks, not as a replacement. You will always mix TensorLayer with some
vanilla TensorFlow code. The set_keep is used to access the placeholder of keeping probabilities
when using Denoising Autoencoder.
Loading data¶
The first piece of code defines a function load_mnist_dataset(). Its purpose is
to download the MNIST dataset (if it hasn’t been downloaded yet) and return it
in the form of regular numpy arrays. There is no TensorLayer involved at all, so
for the purpose of this tutorial, we can regard it as:
X_train, y_train, X_val, y_val, X_test, y_test = \
tl.files.load_mnist_dataset(shape=(-1,784))
X_train.shape is (50000, 784), to be interpreted as: 50,000
images and each image has 784 pixels. y_train.shape is simply (50000,), which is a vector the same
length of X_train giving an integer class label for each image – namely,
the digit between 0 and 9 depicted in the image (according to the human
annotator who drew that digit).
For Convolutional Neural Network example, the MNIST can be load as 4D version as follow:
X_train, y_train, X_val, y_val, X_test, y_test = \
tl.files.load_mnist_dataset(shape=(-1, 28, 28, 1))
X_train.shape is (50000, 28, 28, 1) which represents 50,000 images with 1 channel, 28 rows and 28 columns each.
Channel one is because it is a grey scale image, every pixel have only one value.
Building the model¶
This is where TensorLayer steps in. It allows you to define an arbitrarily structured neural network by creating and stacking or merging layers. Since every layer knows its immediate incoming layers, the output layer (or output layers) of a network double as a handle to the network as a whole, so usually this is the only thing we will pass on to the rest of the code.
As mentioned above, tutorial_mnist.py supports four types of models, and we
implement that via easily exchangeable functions of the same interface.
First, we’ll define a function that creates a Multi-Layer Perceptron (MLP) of
a fixed architecture, explaining all the steps in detail. We’ll then implement
a Denosing Autoencoder (DAE), after that we will then stack all Denoising Autoencoder and
supervised fine-tune them. Finally, we’ll show how to create a
Convolutional Neural Network (CNN). In addition, a simple example for MNIST
dataset in tutorial_mnist_simple.py, a CNN example for CIFAR-10 dataset in
tutorial_cifar10_tfrecord.py.
Multi-Layer Perceptron (MLP)¶
The first script, main_test_layers(), creates an MLP of two hidden layers of
800 units each, followed by a softmax output layer of 10 units. It applies 20%
dropout to the input data and 50% dropout to the hidden layers.
To feed data into the network, TensofFlow placeholders need to be defined as follow.
The None here means the network will accept input data of arbitrary batchsize after compilation.
The x is used to hold the X_train data and y_ is used to hold the y_train data.
If you know the batchsize beforehand and do not need this flexibility, you should give the batchsize
here – especially for convolutional layers, this can allow TensorFlow to apply
some optimizations.
x = tf.placeholder(tf.float32, shape=[None, 784], name='x')
y_ = tf.placeholder(tf.int64, shape=[None, ], name='y_')
The foundation of each neural network in TensorLayer is an
InputLayer instance
representing the input data that will subsequently be fed to the network. Note
that the InputLayer is not tied to any specific data yet.
network = tl.layers.InputLayer(x, name='input_layer')
Before adding the first hidden layer, we’ll apply 20% dropout to the input
data. This is realized via a DropoutLayer instance:
network = tl.layers.DropoutLayer(network, keep=0.8, name='drop1')
Note that the first constructor argument is the incoming layer, the second
argument is the keeping probability for the activation value. Now we’ll proceed
with the first fully-connected hidden layer of 800 units. Note
that when stacking a DenseLayer.
network = tl.layers.DenseLayer(network, n_units=800, act = tf.nn.relu, name='relu1')
Again, the first constructor argument means that we’re stacking network on
top of network.
n_units simply gives the number of units for this fully-connected layer.
act takes an activation function, several of which are defined
in tensorflow.nn and tensorlayer.activation. Here we’ve chosen the rectifier, so
we’ll obtain ReLUs. We’ll now add dropout of 50%, another 800-unit dense layer and 50% dropout
again:
network = tl.layers.DropoutLayer(network, keep=0.5, name='drop2')
network = tl.layers.DenseLayer(network, n_units=800, act = tf.nn.relu, name='relu2')
network = tl.layers.DropoutLayer(network, keep=0.5, name='drop3')
Finally, we’ll add the fully-connected output layer which the n_units equals to
the number of classes. Note that, the softmax is implemented internally in tf.nn.sparse_softmax_cross_entropy_with_logits()
to speed up computation, so we used identity in the last layer, more
details in tl.cost.cross_entropy().
network = tl.layers.DenseLayer(network,
n_units=10,
act = tf.identity,
name='output_layer')
As mentioned above, each layer is linked to its incoming layer(s), so we only need the output layer(s) to access a network in TensorLayer:
y = network.outputs
y_op = tf.argmax(tf.nn.softmax(y), 1)
cost = tf.reduce_mean(tf.nn.sparse_softmax_cross_entropy_with_logits(y, y_))
Here, network.outputs is the 10 identity outputs from the network (in one hot format), y_op is the integer
output represents the class index. While cost is the cross-entropy between target and predicted labels.
Denoising Autoencoder (DAE)¶
Autoencoder is an unsupervised learning model which is able to extract representative features, it has become more widely used for learning generative models of data and Greedy layer-wise pre-train. For vanilla Autoencoder see Deeplearning Tutorial.
The script main_test_denoise_AE() implements a Denoising Autoencoder with corrosion rate of 50%.
The Autoencoder can be defined as follow, where an Autoencoder is represented by a DenseLayer:
network = tl.layers.InputLayer(x, name='input_layer')
network = tl.layers.DropoutLayer(network, keep=0.5, name='denoising1')
network = tl.layers.DenseLayer(network, n_units=200, act=tf.nn.sigmoid, name='sigmoid1')
recon_layer1 = tl.layers.ReconLayer(network,
x_recon=x,
n_units=784,
act=tf.nn.sigmoid,
name='recon_layer1')
To train the DenseLayer, simply run ReconLayer.pretrain(), if using denoising Autoencoder, the name of
corrosion layer (a DropoutLayer) need to be specified as follow. To save the feature images, set save to True.
There are many kinds of pre-train metrices according to different architectures and applications. For sigmoid activation,
the Autoencoder can be implemented by using KL divergence, while for rectifer, L1 regularization of activation outputs
can make the output to be sparse. So the default behaviour of ReconLayer only provide KLD and cross-entropy for sigmoid
activation function and L1 of activation outputs and mean-squared-error for rectifing activation function.
We recommend you to modify ReconLayer to achieve your own pre-train metrice.
recon_layer1.pretrain(sess,
x=x,
X_train=X_train,
X_val=X_val,
denoise_name='denoising1',
n_epoch=200,
batch_size=128,
print_freq=10,
save=True,
save_name='w1pre_')
In addition, the script main_test_stacked_denoise_AE() shows how to stacked multiple Autoencoder to one network and then
fine-tune.
Convolutional Neural Network (CNN)¶
Finally, the main_test_cnn_layer() script creates two CNN layers and
max pooling stages, a fully-connected hidden layer and a fully-connected output
layer. More CNN examples can be found in the tutorial scripts, like tutorial_cifar10_tfrecord.py.
At the begin, we add a Conv2dLayer with 32 filters of size 5x5 on top, follow by
max-pooling of factor 2 in both dimensions. And then apply a Conv2dLayer with
64 filters of size 5x5 again and follow by a max_pool again. After that, flatten
the 4D output to 1D vector by using FlattenLayer, and apply a dropout with 50%
to last hidden layer. The ? represents arbitrary batch_size.
Note, tutorial_mnist.py introduces the simplified CNN API for beginner.
network = tl.layers.InputLayer(x, name='input_layer')
network = tl.layers.Conv2dLayer(network,
act = tf.nn.relu,
shape = [5, 5, 1, 32], # 32 features for each 5x5 patch
strides=[1, 1, 1, 1],
padding='SAME',
name ='cnn_layer1') # output: (?, 28, 28, 32)
network = tl.layers.PoolLayer(network,
ksize=[1, 2, 2, 1],
strides=[1, 2, 2, 1],
padding='SAME',
pool = tf.nn.max_pool,
name ='pool_layer1',) # output: (?, 14, 14, 32)
network = tl.layers.Conv2dLayer(network,
act = tf.nn.relu,
shape = [5, 5, 32, 64], # 64 features for each 5x5 patch
strides=[1, 1, 1, 1],
padding='SAME',
name ='cnn_layer2') # output: (?, 14, 14, 64)
network = tl.layers.PoolLayer(network,
ksize=[1, 2, 2, 1],
strides=[1, 2, 2, 1],
padding='SAME',
pool = tf.nn.max_pool,
name ='pool_layer2',) # output: (?, 7, 7, 64)
network = tl.layers.FlattenLayer(network, name='flatten_layer')
# output: (?, 3136)
network = tl.layers.DropoutLayer(network, keep=0.5, name='drop1')
# output: (?, 3136)
network = tl.layers.DenseLayer(network, n_units=256, act = tf.nn.relu, name='relu1')
# output: (?, 256)
network = tl.layers.DropoutLayer(network, keep=0.5, name='drop2')
# output: (?, 256)
network = tl.layers.DenseLayer(network, n_units=10,
act = tf.identity, name='output_layer')
# output: (?, 10)
Note
For experts: Conv2dLayer will create a convolutional layer using
tensorflow.nn.conv2d, TensorFlow’s default convolution.
Training the model¶
The remaining part of the tutorial_mnist.py script copes with setting up and running
a training loop over the MNIST dataset by using cross-entropy only.
Dataset iteration¶
An iteration function for synchronously iterating over two
numpy arrays of input data and targets, respectively, in mini-batches of a
given number of items. More iteration function can be found in tensorlayer.iterate
tl.iterate.minibatches(inputs, targets, batchsize, shuffle=False)
Loss and update expressions¶
Continuing, we create a loss expression to be minimized in training:
y = network.outputs
y_op = tf.argmax(tf.nn.softmax(y), 1)
cost = tf.reduce_mean(tf.nn.sparse_softmax_cross_entropy_with_logits(y, y_))
More cost or regularization can be applied here, take main_test_layers() for example,
to apply max-norm on the weight matrices, we can add the following line:
cost = cost + tl.cost.maxnorm_regularizer(1.0)(network.all_params[0]) +
tl.cost.maxnorm_regularizer(1.0)(network.all_params[2])
Depending on the problem you are solving, you will need different loss functions,
see tensorlayer.cost for more.
Having the model and the loss function defined, we create update expressions for training the network. TensorLayer do not provide many optimizers, we used TensorFlow’s optimizer instead:
train_params = network.all_params
train_op = tf.train.AdamOptimizer(learning_rate, beta1=0.9, beta2=0.999,
epsilon=1e-08, use_locking=False).minimize(cost, var_list=train_params)
For training the network, we fed data and the keeping probabilities to the feed_dict.
feed_dict = {x: X_train_a, y_: y_train_a}
feed_dict.update( network.all_drop )
sess.run(train_op, feed_dict=feed_dict)
While, for validation and testing, we use slightly different way. All
dropout, dropconnect, corrosion layers need to be disable.
tl.utils.dict_to_one set all network.all_drop to 1.
dp_dict = tl.utils.dict_to_one( network.all_drop )
feed_dict = {x: X_test_a, y_: y_test_a}
feed_dict.update(dp_dict)
err, ac = sess.run([cost, acc], feed_dict=feed_dict)
As an additional monitoring quantity, we create an expression for the classification accuracy:
correct_prediction = tf.equal(tf.argmax(y, 1), y_)
acc = tf.reduce_mean(tf.cast(correct_prediction, tf.float32))
What Next?¶
We also have a more advanced image classification example in tutorial_cifar10_tfrecord.py.
Please read the code and notes, figure out how to generate more training data and what
is local response normalization. After that, try to implement
Residual Network (Hint: you may want
to use the Layer.outputs).
Run the Pong Game example¶
In the second part of the tutorial, we will run the Deep Reinforcement Learning example that is introduced by Karpathy in Deep Reinforcement Learning: Pong from Pixels.
python tutorial_atari_pong.py
Before running the tutorial code, you need to install OpenAI gym environment which is a benchmark for Reinforcement Learning. If everything is set up correctly, you will get an output like the following:
[2016-07-12 09:31:59,760] Making new env: Pong-v0
[TL] InputLayer input_layer (?, 6400)
[TL] DenseLayer relu1: 200, relu
[TL] DenseLayer output_layer: 3, identity
param 0: (6400, 200) (mean: -0.000009, median: -0.000018 std: 0.017393)
param 1: (200,) (mean: 0.000000, median: 0.000000 std: 0.000000)
param 2: (200, 3) (mean: 0.002239, median: 0.003122 std: 0.096611)
param 3: (3,) (mean: 0.000000, median: 0.000000 std: 0.000000)
num of params: 1280803
layer 0: Tensor("Relu:0", shape=(?, 200), dtype=float32)
layer 1: Tensor("add_1:0", shape=(?, 3), dtype=float32)
episode 0: game 0 took 0.17381s, reward: -1.000000
episode 0: game 1 took 0.12629s, reward: 1.000000 !!!!!!!!
episode 0: game 2 took 0.17082s, reward: -1.000000
episode 0: game 3 took 0.08944s, reward: -1.000000
episode 0: game 4 took 0.09446s, reward: -1.000000
episode 0: game 5 took 0.09440s, reward: -1.000000
episode 0: game 6 took 0.32798s, reward: -1.000000
episode 0: game 7 took 0.74437s, reward: -1.000000
episode 0: game 8 took 0.43013s, reward: -1.000000
episode 0: game 9 took 0.42496s, reward: -1.000000
episode 0: game 10 took 0.37128s, reward: -1.000000
episode 0: game 11 took 0.08979s, reward: -1.000000
episode 0: game 12 took 0.09138s, reward: -1.000000
episode 0: game 13 took 0.09142s, reward: -1.000000
episode 0: game 14 took 0.09639s, reward: -1.000000
episode 0: game 15 took 0.09852s, reward: -1.000000
episode 0: game 16 took 0.09984s, reward: -1.000000
episode 0: game 17 took 0.09575s, reward: -1.000000
episode 0: game 18 took 0.09416s, reward: -1.000000
episode 0: game 19 took 0.08674s, reward: -1.000000
episode 0: game 20 took 0.09628s, reward: -1.000000
resetting env. episode reward total was -20.000000. running mean: -20.000000
episode 1: game 0 took 0.09910s, reward: -1.000000
episode 1: game 1 took 0.17056s, reward: -1.000000
episode 1: game 2 took 0.09306s, reward: -1.000000
episode 1: game 3 took 0.09556s, reward: -1.000000
episode 1: game 4 took 0.12520s, reward: 1.000000 !!!!!!!!
episode 1: game 5 took 0.17348s, reward: -1.000000
episode 1: game 6 took 0.09415s, reward: -1.000000
This example allow computer to learn how to play Pong game from the screen inputs, just like human behavior. After training for 15,000 episodes, the computer can win 20% of the games. The computer win 35% of the games at 20,000 episode, we can seen the computer learn faster and faster as it has more winning data to train. If you run it for 30,000 episode, it start to win.
render = False
resume = False
Setting render to True, if you want to display the game environment. When
you run the code again, you can set resume to True, the code will load the
existing model and train the model basic on it.
Understand Reinforcement learning¶
Pong Game¶
To understand Reinforcement Learning, we let computer to learn how to play Pong game from the original screen inputs. Before we start, we highly recommend you to go through a famous blog called Deep Reinforcement Learning: Pong from Pixels which is a minimalistic implementation of Deep Reinforcement Learning by using python-numpy and OpenAI gym environment.
python tutorial_atari_pong.py
Policy Network¶
In Deep Reinforcement Learning, the Policy Network is the same with Deep Neural Network, it is our player (or “agent”) who output actions to tell what we should do (move UP or DOWN); in Karpathy’s code, he only defined 2 actions, UP and DOWN and using a single simgoid output; In order to make our tutorial more generic, we defined 3 actions which are UP, DOWN and STOP (do nothing) by using 3 softmax outputs.
# observation for training
states_batch_pl = tf.placeholder(tf.float32, shape=[None, D])
network = tl.layers.InputLayer(states_batch_pl, name='input_layer')
network = tl.layers.DenseLayer(network, n_units=H,
act = tf.nn.relu, name='relu1')
network = tl.layers.DenseLayer(network, n_units=3,
act = tf.identity, name='output_layer')
probs = network.outputs
sampling_prob = tf.nn.softmax(probs)
Then when our agent is playing Pong, it calculates the probabilities of different actions, and then draw sample (action) from this uniform distribution. As the actions are represented by 1, 2 and 3, but the softmax outputs should be start from 0, we calculate the label value by minus 1.
prob = sess.run(
sampling_prob,
feed_dict={states_batch_pl: x}
)
# action. 1: STOP 2: UP 3: DOWN
action = np.random.choice([1,2,3], p=prob.flatten())
...
ys.append(action - 1)
Policy Gradient¶
Policy gradient methods are end-to-end algorithms that directly learn policy functions mapping states to actions. An approximate policy could be learned directly by maximizing the expected rewards. The parameters of a policy function (e.g. the parameters of a policy network used in the pong example) could be trained and learned under the guidance of the gradient of expected rewards. In other words, we can gradually tune the policy function via updating its parameters, such that it will generate actions from given states towards higher rewards.
An alternative method to policy gradient is Deep Q-Learning (DQN). It is based on Q-Learning that tries to learn a value function (called Q function) mapping states and actions to some value. DQN employs a deep neural network to represent the Q function as a function approximator. The training is done by minimizing temporal-difference errors. A neurobiologically inspired mechanism called “experience replay” is typically used along with DQN to help improve its stability caused by the use of non-linear function approximator.
You can check the following papers to gain better understandings about Reinforcement Learning.
The most successful applications of Deep Reinforcement Learning in recent years include DQN with experience replay to play Atari games and AlphaGO that for the first time beats world-class professional GO players. AlphaGO used the policy gradient method to train its policy network that is similar to the example of Pong game.
Dataset iteration¶
In Reinforcement Learning, we consider a final decision as an episode. In Pong game, a episode is a few dozen games, because the games go up to score of 21 for either player. Then the batch size is how many episode we consider to update the model. In the tutorial, we train a 2-layer policy network with 200 hidden layer units using RMSProp on batches of 10 episodes.
Loss and update expressions¶
Continuing, we create a loss expression to be minimized in training:
actions_batch_pl = tf.placeholder(tf.int32, shape=[None])
discount_rewards_batch_pl = tf.placeholder(tf.float32, shape=[None])
loss = tl.rein.cross_entropy_reward_loss(probs, actions_batch_pl,
discount_rewards_batch_pl)
...
...
sess.run(
train_op,
feed_dict={
states_batch_pl: epx,
actions_batch_pl: epy,
discount_rewards_batch_pl: disR
}
)
The loss in a batch is relate to all outputs of Policy Network, all actions we made and the corresponding discounted rewards in a batch. We first compute the loss of each action by multiplying the discounted reward and the cross-entropy between its output and its true action. The final loss in a batch is the sum of all loss of the actions.
What Next?¶
The tutorial above shows how you can build your own agent, end-to-end. While it has reasonable quality, the default parameters will not give you the best agent model. Here are a few things you can improve.
First of all, instead of conventional MLP model, we can use CNNs to capture the screen information better as Playing Atari with Deep Reinforcement Learning describe.
Also, the default parameters of the model are not tuned. You can try changing the learning rate, decay, or initializing the weights of your model in a different way.
Finally, you can try the model on different tasks (games).
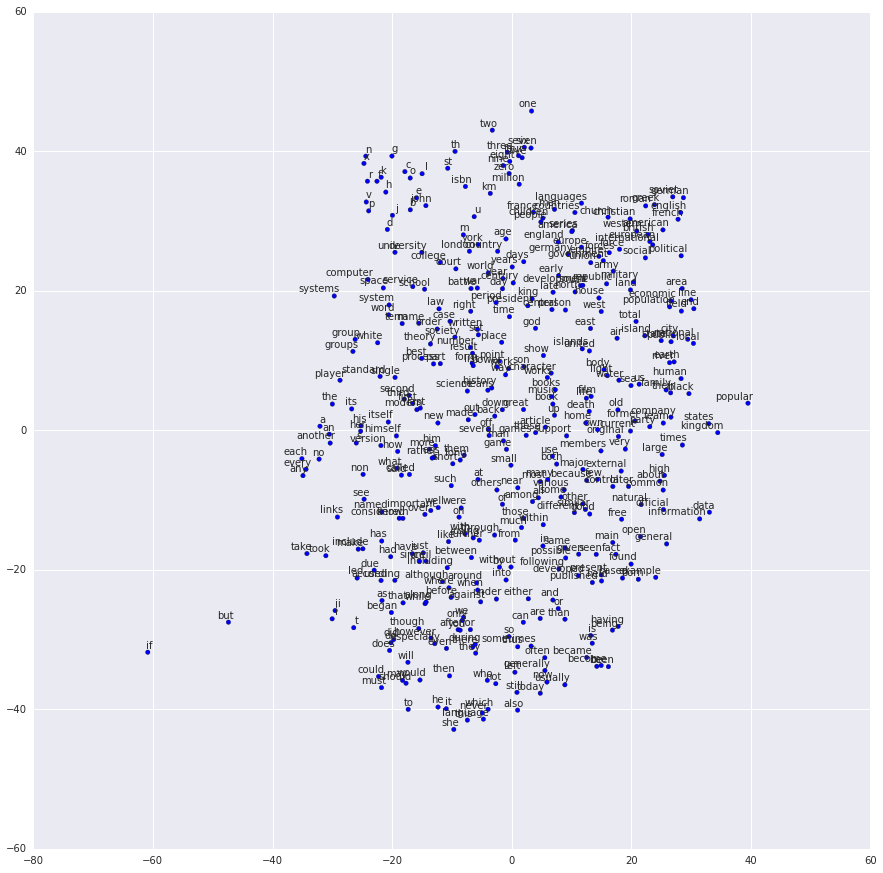
Run the Word2Vec example¶
In this part of the tutorial, we train a matrix for words, where each word can be represented by a unique row vector in the matrix. In the end, similar words will have similar vectors. Then as we plot out the words into a two-dimensional plane, words that are similar end up clustering nearby each other.
python tutorial_word2vec_basic.py
If everything is set up correctly, you will get an output in the end.
Understand Word Embedding¶
Word Embedding¶
We highly recommend you to read Colah’s blog Word Representations to understand why we want to use a vector representation, and how to compute the vectors. (For chinese reader please click. More details about word2vec can be found in Word2vec Parameter Learning Explained.
Bascially, training an embedding matrix is an unsupervised learning. As every word
is refected by an unique ID, which is the row index of the embedding matrix,
a word can be converted into a vector, it can better represent the meaning.
For example, there seems to be a constant male-female difference vector:
woman − man = queen - king, this means one dimension in the vector represents gender.
The model can be created as follow.
# train_inputs is a row vector, a input is an integer id of single word.
# train_labels is a column vector, a label is an integer id of single word.
# valid_dataset is a column vector, a valid set is an integer id of single word.
train_inputs = tf.placeholder(tf.int32, shape=[batch_size])
train_labels = tf.placeholder(tf.int32, shape=[batch_size, 1])
valid_dataset = tf.constant(valid_examples, dtype=tf.int32)
# Look up embeddings for inputs.
emb_net = tl.layers.Word2vecEmbeddingInputlayer(
inputs = train_inputs,
train_labels = train_labels,
vocabulary_size = vocabulary_size,
embedding_size = embedding_size,
num_sampled = num_sampled,
nce_loss_args = {},
E_init = tf.random_uniform_initializer(minval=-1.0, maxval=1.0),
E_init_args = {},
nce_W_init = tf.truncated_normal_initializer(
stddev=float(1.0/np.sqrt(embedding_size))),
nce_W_init_args = {},
nce_b_init = tf.constant_initializer(value=0.0),
nce_b_init_args = {},
name ='word2vec_layer',
)
Dataset iteration and loss¶
Word2vec uses Negative Sampling and Skip-Gram model for training.
Noise-Contrastive Estimation Loss (NCE) can help to reduce the computation
of loss. Skip-Gram inverts context and targets, tries to predict each context
word from its target word. We use tl.nlp.generate_skip_gram_batch to
generate training data as follow, see tutorial_generate_text.py .
# NCE cost expression is provided by Word2vecEmbeddingInputlayer
cost = emb_net.nce_cost
train_params = emb_net.all_params
train_op = tf.train.AdagradOptimizer(learning_rate, initial_accumulator_value=0.1,
use_locking=False).minimize(cost, var_list=train_params)
data_index = 0
while (step < num_steps):
batch_inputs, batch_labels, data_index = tl.nlp.generate_skip_gram_batch(
data=data, batch_size=batch_size, num_skips=num_skips,
skip_window=skip_window, data_index=data_index)
feed_dict = {train_inputs : batch_inputs, train_labels : batch_labels}
_, loss_val = sess.run([train_op, cost], feed_dict=feed_dict)
Restore existing Embedding matrix¶
In the end of training the embedding matrix, we save the matrix and
corresponding dictionaries. Then next time, we can restore the matrix and
directories as follow.
(see main_restore_embedding_layer() in tutorial_generate_text.py)
vocabulary_size = 50000
embedding_size = 128
model_file_name = "model_word2vec_50k_128"
batch_size = None
print("Load existing embedding matrix and dictionaries")
all_var = tl.files.load_npy_to_any(name=model_file_name+'.npy')
data = all_var['data']; count = all_var['count']
dictionary = all_var['dictionary']
reverse_dictionary = all_var['reverse_dictionary']
tl.nlp.save_vocab(count, name='vocab_'+model_file_name+'.txt')
del all_var, data, count
load_params = tl.files.load_npz(name=model_file_name+'.npz')
x = tf.placeholder(tf.int32, shape=[batch_size])
y_ = tf.placeholder(tf.int32, shape=[batch_size, 1])
emb_net = tl.layers.EmbeddingInputlayer(
inputs = x,
vocabulary_size = vocabulary_size,
embedding_size = embedding_size,
name ='embedding_layer')
tl.layers.initialize_global_variables(sess)
tl.files.assign_params(sess, [load_params[0]], emb_net)
Run the PTB example¶
Penn TreeBank (PTB) dataset is used in many LANGUAGE MODELING papers, including “Empirical Evaluation and Combination of Advanced Language Modeling Techniques”, “Recurrent Neural Network Regularization”. It consists of 929k training words, 73k validation words, and 82k test words. It has 10k words in its vocabulary.
The PTB example is trying to show how to train a recurrent neural network on a challenging task of language modeling.
Given a sentence “I am from Imperial College London”, the model can learn to
predict “Imperial College London” from “from Imperial College”. In other
word, it predict the next word in a text given a history of previous words.
In the previous example , num_steps (sequence length) is 3.
python tutorial_ptb_lstm.py
The script provides three settings (small, medium, large), where a larger model has better performance. You can choose different settings in:
flags.DEFINE_string(
"model", "small",
"A type of model. Possible options are: small, medium, large.")
If you choose the small setting, you can see:
Epoch: 1 Learning rate: 1.000
0.004 perplexity: 5220.213 speed: 7635 wps
0.104 perplexity: 828.871 speed: 8469 wps
0.204 perplexity: 614.071 speed: 8839 wps
0.304 perplexity: 495.485 speed: 8889 wps
0.404 perplexity: 427.381 speed: 8940 wps
0.504 perplexity: 383.063 speed: 8920 wps
0.604 perplexity: 345.135 speed: 8920 wps
0.703 perplexity: 319.263 speed: 8949 wps
0.803 perplexity: 298.774 speed: 8975 wps
0.903 perplexity: 279.817 speed: 8986 wps
Epoch: 1 Train Perplexity: 265.558
Epoch: 1 Valid Perplexity: 178.436
...
Epoch: 13 Learning rate: 0.004
0.004 perplexity: 56.122 speed: 8594 wps
0.104 perplexity: 40.793 speed: 9186 wps
0.204 perplexity: 44.527 speed: 9117 wps
0.304 perplexity: 42.668 speed: 9214 wps
0.404 perplexity: 41.943 speed: 9269 wps
0.504 perplexity: 41.286 speed: 9271 wps
0.604 perplexity: 39.989 speed: 9244 wps
0.703 perplexity: 39.403 speed: 9236 wps
0.803 perplexity: 38.742 speed: 9229 wps
0.903 perplexity: 37.430 speed: 9240 wps
Epoch: 13 Train Perplexity: 36.643
Epoch: 13 Valid Perplexity: 121.475
Test Perplexity: 116.716
The PTB example shows that RNN is able to model language, but this example did not do something practically interesting. However, you should read through this example and “Understand LSTM” in order to understand the basics of RNN. After that, you will learn how to generate text, how to achieve language translation, and how to build a question answering system by using RNN.
Understand LSTM¶
Recurrent Neural Network¶
We personally think Andrey Karpathy’s blog is the best material to Understand Recurrent Neural Network , after reading that, Colah’s blog can help you to Understand LSTM Network [chinese] which can solve The Problem of Long-Term Dependencies. We will not describe more about the theory of RNN, so please read through these blogs before you go on.
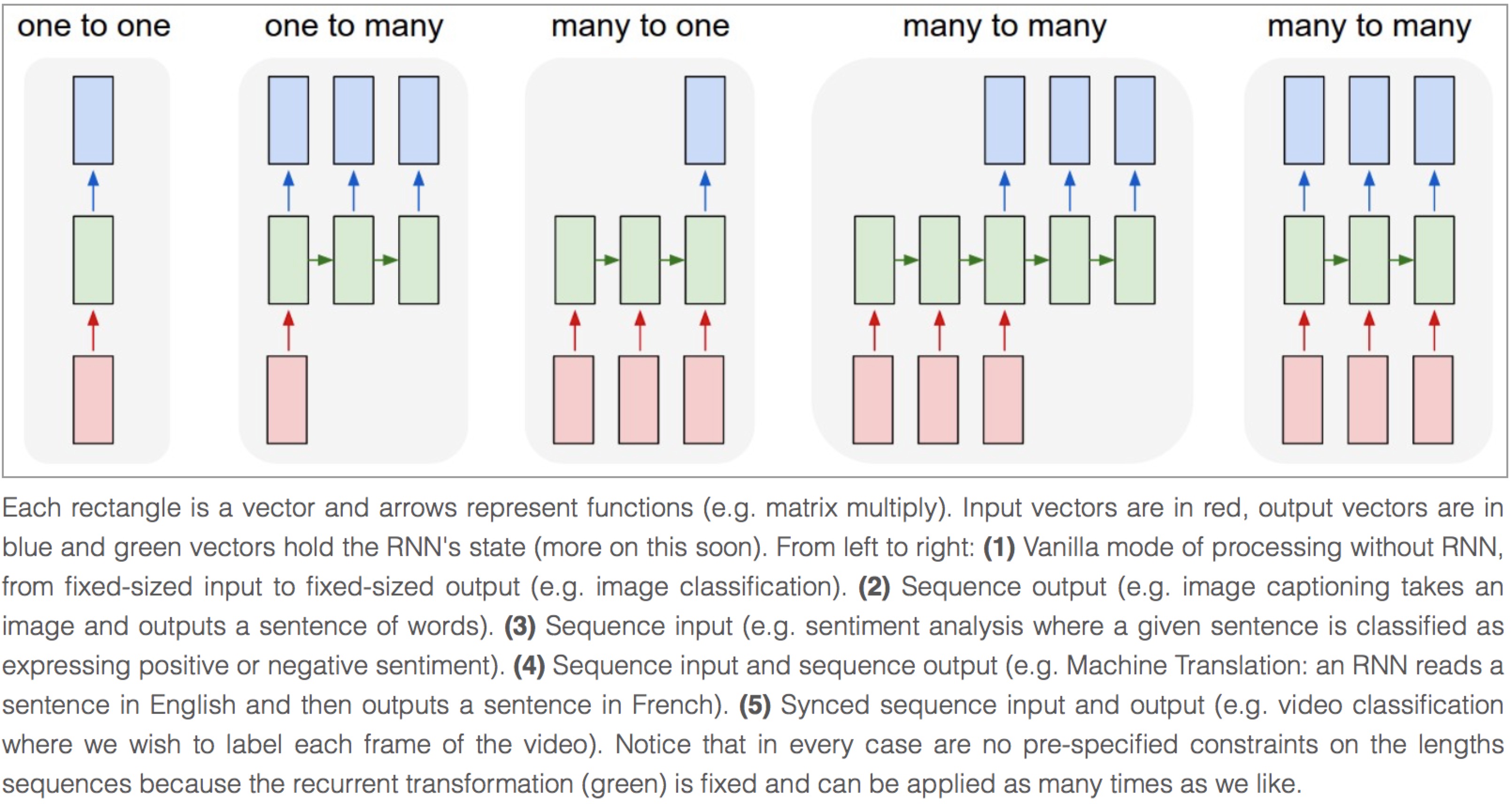
Image by Andrey Karpathy
Synced sequence input and output¶
The model in PTB example is a typical type of synced sequence input and output, which was described by Karpathy as “(5) Synced sequence input and output (e.g. video classification where we wish to label each frame of the video). Notice that in every case there are no pre-specified constraints on the lengths of sequences because the recurrent transformation (green) can be applied as many times as we like.”
The model is built as follows. Firstly, we transfer the words into word vectors by looking up an embedding matrix. In this tutorial, there is no pre-training on the embedding matrix. Secondly, we stack two LSTMs together using dropout between the embedding layer, LSTM layers, and the output layer for regularization. In the final layer, the model provides a sequence of softmax outputs.
The first LSTM layer outputs [batch_size, num_steps, hidden_size] for stacking
another LSTM after it. The second LSTM layer outputs [batch_size*num_steps, hidden_size]
for stacking a DenseLayer after it. Then the DenseLayer computes the softmax outputs of each example
(n_examples = batch_size*num_steps).
To understand the PTB tutorial, you can also read TensorFlow PTB tutorial.
(Note that, TensorLayer supports DynamicRNNLayer after v1.1, so you can set the input/output dropouts, number of RNN layers in one single layer)
network = tl.layers.EmbeddingInputlayer(
inputs = x,
vocabulary_size = vocab_size,
embedding_size = hidden_size,
E_init = tf.random_uniform_initializer(-init_scale, init_scale),
name ='embedding_layer')
if is_training:
network = tl.layers.DropoutLayer(network, keep=keep_prob, name='drop1')
network = tl.layers.RNNLayer(network,
cell_fn=tf.contrib.rnn.BasicLSTMCell,
cell_init_args={'forget_bias': 0.0},
n_hidden=hidden_size,
initializer=tf.random_uniform_initializer(-init_scale, init_scale),
n_steps=num_steps,
return_last=False,
name='basic_lstm_layer1')
lstm1 = network
if is_training:
network = tl.layers.DropoutLayer(network, keep=keep_prob, name='drop2')
network = tl.layers.RNNLayer(network,
cell_fn=tf.contrib.rnn.BasicLSTMCell,
cell_init_args={'forget_bias': 0.0},
n_hidden=hidden_size,
initializer=tf.random_uniform_initializer(-init_scale, init_scale),
n_steps=num_steps,
return_last=False,
return_seq_2d=True,
name='basic_lstm_layer2')
lstm2 = network
if is_training:
network = tl.layers.DropoutLayer(network, keep=keep_prob, name='drop3')
network = tl.layers.DenseLayer(network,
n_units=vocab_size,
W_init=tf.random_uniform_initializer(-init_scale, init_scale),
b_init=tf.random_uniform_initializer(-init_scale, init_scale),
act = tf.identity, name='output_layer')
Dataset iteration¶
The batch_size can be seen as the number of concurrent computations we are running.
As the following example shows, the first batch learns the sequence information by using items 0 to 9.
The second batch learn the sequence information by using items 10 to 19.
So it ignores the information from items 9 to 10 !n
If only if we set batch_size = 1`, it will consider all the information from items 0 to 20.
The meaning of batch_size here is not the same as the batch_size in the MNIST example. In the MNIST example,
batch_size reflects how many examples we consider in each iteration, while in the
PTB example, batch_size is the number of concurrent processes (segments)
for accelerating the computation.
Some information will be ignored if batch_size > 1, however, if your dataset
is “long” enough (a text corpus usually has billions of words), the ignored
information would not affect the final result.
In the PTB tutorial, we set batch_size = 20, so we divide the dataset into 20 segments.
At the beginning of each epoch, we initialize (reset) the 20 RNN states for the 20
segments to zero, then go through the 20 segments separately.
An example of generating training data is as follows:
train_data = [i for i in range(20)]
for batch in tl.iterate.ptb_iterator(train_data, batch_size=2, num_steps=3):
x, y = batch
print(x, '\n',y)
... [[ 0 1 2] <---x 1st subset/ iteration
... [10 11 12]]
... [[ 1 2 3] <---y
... [11 12 13]]
...
... [[ 3 4 5] <--- 1st batch input 2nd subset/ iteration
... [13 14 15]] <--- 2nd batch input
... [[ 4 5 6] <--- 1st batch target
... [14 15 16]] <--- 2nd batch target
...
... [[ 6 7 8] 3rd subset/ iteration
... [16 17 18]]
... [[ 7 8 9]
... [17 18 19]]
Note
This example can also be considered as pre-training of the word embedding matrix.
Loss and update expressions¶
The cost function is the average cost of each mini-batch:
# See tensorlayer.cost.cross_entropy_seq() for more details
def loss_fn(outputs, targets, batch_size, num_steps):
# Returns the cost function of Cross-entropy of two sequences, implement
# softmax internally.
# outputs : 2D tensor [batch_size*num_steps, n_units of output layer]
# targets : 2D tensor [batch_size, num_steps], need to be reshaped.
# n_examples = batch_size * num_steps
# so
# cost is the average cost of each mini-batch (concurrent process).
loss = tf.nn.seq2seq.sequence_loss_by_example(
[outputs],
[tf.reshape(targets, [-1])],
[tf.ones([batch_size * num_steps])])
cost = tf.reduce_sum(loss) / batch_size
return cost
# Cost for Training
cost = loss_fn(network.outputs, targets, batch_size, num_steps)
For updating, truncated backpropagation clips values of gradients by the ratio of the sum of their norms, so as to make the learning process tractable.
# Truncated Backpropagation for training
with tf.variable_scope('learning_rate'):
lr = tf.Variable(0.0, trainable=False)
tvars = tf.trainable_variables()
grads, _ = tf.clip_by_global_norm(tf.gradients(cost, tvars),
max_grad_norm)
optimizer = tf.train.GradientDescentOptimizer(lr)
train_op = optimizer.apply_gradients(zip(grads, tvars))
In addition, if the epoch index is greater than max_epoch, we decrease the learning rate
by multipling lr_decay.
new_lr_decay = lr_decay ** max(i - max_epoch, 0.0)
sess.run(tf.assign(lr, learning_rate * new_lr_decay))
At the beginning of each epoch, all states of LSTMs need to be reseted (initialized) to zero states. Then after each iteration, the LSTMs’ states is updated, so the new LSTM states (final states) need to be assigned as the initial states of the next iteration:
# set all states to zero states at the beginning of each epoch
state1 = tl.layers.initialize_rnn_state(lstm1.initial_state)
state2 = tl.layers.initialize_rnn_state(lstm2.initial_state)
for step, (x, y) in enumerate(tl.iterate.ptb_iterator(train_data,
batch_size, num_steps)):
feed_dict = {input_data: x, targets: y,
lstm1.initial_state: state1,
lstm2.initial_state: state2,
}
# For training, enable dropout
feed_dict.update( network.all_drop )
# use the new states as the initial state of next iteration
_cost, state1, state2, _ = sess.run([cost,
lstm1.final_state,
lstm2.final_state,
train_op],
feed_dict=feed_dict
)
costs += _cost; iters += num_steps
Predicting¶
After training the model, when we predict the next output, we no long consider
the number of steps (sequence length), i.e. batch_size, num_steps are set to 1.
Then we can output the next word one by one, instead of predicting a sequence
of words from a sequence of words.
input_data_test = tf.placeholder(tf.int32, [1, 1])
targets_test = tf.placeholder(tf.int32, [1, 1])
...
network_test, lstm1_test, lstm2_test = inference(input_data_test,
is_training=False, num_steps=1, reuse=True)
...
cost_test = loss_fn(network_test.outputs, targets_test, 1, 1)
...
print("Evaluation")
# Testing
# go through the test set step by step, it will take a while.
start_time = time.time()
costs = 0.0; iters = 0
# reset all states at the beginning
state1 = tl.layers.initialize_rnn_state(lstm1_test.initial_state)
state2 = tl.layers.initialize_rnn_state(lstm2_test.initial_state)
for step, (x, y) in enumerate(tl.iterate.ptb_iterator(test_data,
batch_size=1, num_steps=1)):
feed_dict = {input_data_test: x, targets_test: y,
lstm1_test.initial_state: state1,
lstm2_test.initial_state: state2,
}
_cost, state1, state2 = sess.run([cost_test,
lstm1_test.final_state,
lstm2_test.final_state],
feed_dict=feed_dict
)
costs += _cost; iters += 1
test_perplexity = np.exp(costs / iters)
print("Test Perplexity: %.3f took %.2fs" % (test_perplexity, time.time() - start_time))
What Next?¶
Now, you have understood Synced sequence input and output. Let’s think about Many to one (Sequence input and one output), so that LSTM is able to predict the next word “English” from “I am from London, I speak ..”.
Please read and understand the code of tutorial_generate_text.py.
It shows you how to restore a pre-trained Embedding matrix and how to learn text
generation from a given context.
Karpathy’s blog : “(3) Sequence input (e.g. sentiment analysis where a given sentence is classified as expressing positive or negative sentiment). “
Run the Translation example¶
python tutorial_translate.py
This script is going to training a neural network to translate English to French. If everything is correct, you will see.
- Download WMT English-to-French translation data, includes training and testing data.
- Create vocabulary files for English and French from training data.
- Create the tokenized training and testing data from original training and testing data.
Prepare raw data
Load or Download WMT English-to-French translation > wmt
Training data : wmt/giga-fren.release2
Testing data : wmt/newstest2013
Create vocabularies
Vocabulary of French : wmt/vocab40000.fr
Vocabulary of English : wmt/vocab40000.en
Creating vocabulary wmt/vocab40000.fr from data wmt/giga-fren.release2.fr
processing line 100000
processing line 200000
processing line 300000
processing line 400000
processing line 500000
processing line 600000
processing line 700000
processing line 800000
processing line 900000
processing line 1000000
processing line 1100000
processing line 1200000
...
processing line 22500000
Creating vocabulary wmt/vocab40000.en from data wmt/giga-fren.release2.en
processing line 100000
...
processing line 22500000
...
Firstly, we download English-to-French translation data from the WMT‘15 Website. The training and testing data as follow. The training data is used to train the model, the testing data is used to evaluate the model.
wmt/training-giga-fren.tar <-- Training data for English-to-French (2.6GB)
giga-fren.release2.* are extracted from it.
wmt/dev-v2.tgz <-- Testing data for different language (21.4MB)
newstest2013.* are extracted from it.
wmt/giga-fren.release2.fr <-- Training data of French (4.57GB)
wmt/giga-fren.release2.en <-- Training data of English (3.79GB)
wmt/newstest2013.fr <-- Testing data of French (393KB)
wmt/newstest2013.en <-- Testing data of English (333KB)
As giga-fren.release2.* are the training data, the context of giga-fren.release2.fr look as follow.
Il a transformé notre vie | Il a transformé la société | Son fonctionnement | La technologie, moteur du changement Accueil | Concepts | Enseignants | Recherche | Aperçu | Collaborateurs | Web HHCC | Ressources | Commentaires Musée virtuel du Canada
Plan du site
Rétroaction
Crédits
English
Qu’est-ce que la lumière?
La découverte du spectre de la lumière blanche Des codes dans la lumière Le spectre électromagnétique Les spectres d’émission Les spectres d’absorption Les années-lumière La pollution lumineuse
Le ciel des premiers habitants La vision contemporaine de l'Univers L’astronomie pour tous
Bande dessinée
Liens
Glossaire
Observatoires
...
While giga-fren.release2.en look as follow, we can see words or sentences
are separated by | or \n.
Changing Lives | Changing Society | How It Works | Technology Drives Change Home | Concepts | Teachers | Search | Overview | Credits | HHCC Web | Reference | Feedback Virtual Museum of Canada Home Page
Site map
Feedback
Credits
Français
What is light ?
The white light spectrum Codes in the light The electromagnetic spectrum Emission spectra Absorption spectra Light-years Light pollution
The sky of the first inhabitants A contemporary vison of the Universe Astronomy for everyone
Cartoon
Links
Glossary
Observatories
The testing data newstest2013.en and newstest2013.fr look as follow.
newstest2013.en :
A Republican strategy to counter the re-election of Obama
Republican leaders justified their policy by the need to combat electoral fraud.
However, the Brennan Centre considers this a myth, stating that electoral fraud is rarer in the United States than the number of people killed by lightning.
newstest2013.fr :
Une stratégie républicaine pour contrer la réélection d'Obama
Les dirigeants républicains justifièrent leur politique par la nécessité de lutter contre la fraude électorale.
Or, le Centre Brennan considère cette dernière comme un mythe, affirmant que la fraude électorale est plus rare aux États-Unis que le nombre de personnes tuées par la foudre.
After downloading the dataset, it start to create vocabulary files,
vocab40000.fr and vocab40000.en from the training data giga-fren.release2.fr
and giga-fren.release2.en, usually it will take a while. The number 40000
reflects the vocabulary size.
The vocab40000.fr (381KB) stores one-item-per-line as follow.
_PAD
_GO
_EOS
_UNK
de
,
.
'
la
et
des
les
à
le
du
l
en
)
d
0
(
00
pour
dans
un
que
une
sur
au
0000
a
par
The vocab40000.en (344KB) stores one-item-per-line as follow as well.
_PAD
_GO
_EOS
_UNK
the
.
,
of
and
to
in
a
)
(
0
for
00
that
is
on
The
0000
be
by
with
or
:
as
"
000
are
;
And then, we start to create the tokenized training and testing data for both English and French. It will take a while as well.
Tokenize data
Tokenizing data in wmt/giga-fren.release2.fr <-- Training data of French
tokenizing line 100000
tokenizing line 200000
tokenizing line 300000
tokenizing line 400000
...
tokenizing line 22500000
Tokenizing data in wmt/giga-fren.release2.en <-- Training data of English
tokenizing line 100000
tokenizing line 200000
tokenizing line 300000
tokenizing line 400000
...
tokenizing line 22500000
Tokenizing data in wmt/newstest2013.fr <-- Testing data of French
Tokenizing data in wmt/newstest2013.en <-- Testing data of English
In the end, all files we have as follow.
wmt/training-giga-fren.tar <-- Compressed Training data for English-to-French (2.6GB)
giga-fren.release2.* are extracted from it.
wmt/dev-v2.tgz <-- Compressed Testing data for different language (21.4MB)
newstest2013.* are extracted from it.
wmt/giga-fren.release2.fr <-- Training data of French (4.57GB)
wmt/giga-fren.release2.en <-- Training data of English (3.79GB)
wmt/newstest2013.fr <-- Testing data of French (393KB)
wmt/newstest2013.en <-- Testing data of English (333KB)
wmt/vocab40000.fr <-- Vocabulary of French (381KB)
wmt/vocab40000.en <-- Vocabulary of English (344KB)
wmt/giga-fren.release2.ids40000.fr <-- Tokenized Training data of French (2.81GB)
wmt/giga-fren.release2.ids40000.en <-- Tokenized Training data of English (2.38GB)
wmt/newstest2013.ids40000.fr <-- Tokenized Testing data of French (268KB)
wmt/newstest2013.ids40000.en <-- Tokenized Testing data of English (232KB)
Now, read all tokenized data into buckets and compute the number of data of each bucket.
Read development (test) data into buckets
dev data: (5, 10) [[13388, 4, 949], [23113, 8, 910, 2]]
en word_ids: [13388, 4, 949]
en context: [b'Preventing', b'the', b'disease']
fr word_ids: [23113, 8, 910, 2]
fr context: [b'Pr\xc3\xa9venir', b'la', b'maladie', b'_EOS']
Read training data into buckets (limit: 0)
reading data line 100000
reading data line 200000
reading data line 300000
reading data line 400000
reading data line 500000
reading data line 600000
reading data line 700000
reading data line 800000
...
reading data line 22400000
reading data line 22500000
train_bucket_sizes: [239121, 1344322, 5239557, 10445326]
train_total_size: 17268326.0
train_buckets_scale: [0.013847375825543252, 0.09169638099257565, 0.3951164693091849, 1.0]
train data: (5, 10) [[1368, 3344], [1089, 14, 261, 2]]
en word_ids: [1368, 3344]
en context: [b'Site', b'map']
fr word_ids: [1089, 14, 261, 2]
fr context: [b'Plan', b'du', b'site', b'_EOS']
the num of training data in each buckets: [239121, 1344322, 5239557, 10445326]
the num of training data: 17268326
train_buckets_scale: [0.013847375825543252, 0.09169638099257565, 0.3951164693091849, 1.0]
Start training by using the tokenized bucket data, the training process can
only be terminated by stop the program.
When steps_per_checkpoint = 10 you will see.
Create Embedding Attention Seq2seq Model
global step 10 learning rate 0.5000 step-time 22.26 perplexity 12761.50
eval: bucket 0 perplexity 5887.75
eval: bucket 1 perplexity 3891.96
eval: bucket 2 perplexity 3748.77
eval: bucket 3 perplexity 4940.10
global step 20 learning rate 0.5000 step-time 20.38 perplexity 28761.36
eval: bucket 0 perplexity 10137.01
eval: bucket 1 perplexity 12809.90
eval: bucket 2 perplexity 15758.65
eval: bucket 3 perplexity 26760.93
global step 30 learning rate 0.5000 step-time 20.64 perplexity 6372.95
eval: bucket 0 perplexity 1789.80
eval: bucket 1 perplexity 1690.00
eval: bucket 2 perplexity 2190.18
eval: bucket 3 perplexity 3808.12
global step 40 learning rate 0.5000 step-time 16.10 perplexity 3418.93
eval: bucket 0 perplexity 4778.76
eval: bucket 1 perplexity 3698.90
eval: bucket 2 perplexity 3902.37
eval: bucket 3 perplexity 22612.44
global step 50 learning rate 0.5000 step-time 14.84 perplexity 1811.02
eval: bucket 0 perplexity 644.72
eval: bucket 1 perplexity 759.16
eval: bucket 2 perplexity 984.18
eval: bucket 3 perplexity 1585.68
global step 60 learning rate 0.5000 step-time 19.76 perplexity 1580.55
eval: bucket 0 perplexity 1724.84
eval: bucket 1 perplexity 2292.24
eval: bucket 2 perplexity 2698.52
eval: bucket 3 perplexity 3189.30
global step 70 learning rate 0.5000 step-time 17.16 perplexity 1250.57
eval: bucket 0 perplexity 298.55
eval: bucket 1 perplexity 502.04
eval: bucket 2 perplexity 645.44
eval: bucket 3 perplexity 604.29
global step 80 learning rate 0.5000 step-time 18.50 perplexity 793.90
eval: bucket 0 perplexity 2056.23
eval: bucket 1 perplexity 1344.26
eval: bucket 2 perplexity 767.82
eval: bucket 3 perplexity 649.38
global step 90 learning rate 0.5000 step-time 12.61 perplexity 541.57
eval: bucket 0 perplexity 180.86
eval: bucket 1 perplexity 350.99
eval: bucket 2 perplexity 326.85
eval: bucket 3 perplexity 383.22
global step 100 learning rate 0.5000 step-time 18.42 perplexity 471.12
eval: bucket 0 perplexity 216.63
eval: bucket 1 perplexity 348.96
eval: bucket 2 perplexity 318.20
eval: bucket 3 perplexity 389.92
global step 110 learning rate 0.5000 step-time 18.39 perplexity 474.89
eval: bucket 0 perplexity 8049.85
eval: bucket 1 perplexity 1677.24
eval: bucket 2 perplexity 936.98
eval: bucket 3 perplexity 657.46
global step 120 learning rate 0.5000 step-time 18.81 perplexity 832.11
eval: bucket 0 perplexity 189.22
eval: bucket 1 perplexity 360.69
eval: bucket 2 perplexity 410.57
eval: bucket 3 perplexity 456.40
global step 130 learning rate 0.5000 step-time 20.34 perplexity 452.27
eval: bucket 0 perplexity 196.93
eval: bucket 1 perplexity 655.18
eval: bucket 2 perplexity 860.44
eval: bucket 3 perplexity 1062.36
global step 140 learning rate 0.5000 step-time 21.05 perplexity 847.11
eval: bucket 0 perplexity 391.88
eval: bucket 1 perplexity 339.09
eval: bucket 2 perplexity 320.08
eval: bucket 3 perplexity 376.44
global step 150 learning rate 0.4950 step-time 15.53 perplexity 590.03
eval: bucket 0 perplexity 269.16
eval: bucket 1 perplexity 286.51
eval: bucket 2 perplexity 391.78
eval: bucket 3 perplexity 485.23
global step 160 learning rate 0.4950 step-time 19.36 perplexity 400.80
eval: bucket 0 perplexity 137.00
eval: bucket 1 perplexity 198.85
eval: bucket 2 perplexity 276.58
eval: bucket 3 perplexity 357.78
global step 170 learning rate 0.4950 step-time 17.50 perplexity 541.79
eval: bucket 0 perplexity 1051.29
eval: bucket 1 perplexity 626.64
eval: bucket 2 perplexity 496.32
eval: bucket 3 perplexity 458.85
global step 180 learning rate 0.4950 step-time 16.69 perplexity 400.65
eval: bucket 0 perplexity 178.12
eval: bucket 1 perplexity 299.86
eval: bucket 2 perplexity 294.84
eval: bucket 3 perplexity 296.46
global step 190 learning rate 0.4950 step-time 19.93 perplexity 886.73
eval: bucket 0 perplexity 860.60
eval: bucket 1 perplexity 910.16
eval: bucket 2 perplexity 909.24
eval: bucket 3 perplexity 786.04
global step 200 learning rate 0.4901 step-time 18.75 perplexity 449.64
eval: bucket 0 perplexity 152.13
eval: bucket 1 perplexity 234.41
eval: bucket 2 perplexity 249.66
eval: bucket 3 perplexity 285.95
...
global step 980 learning rate 0.4215 step-time 18.31 perplexity 208.74
eval: bucket 0 perplexity 78.45
eval: bucket 1 perplexity 108.40
eval: bucket 2 perplexity 137.83
eval: bucket 3 perplexity 173.53
global step 990 learning rate 0.4173 step-time 17.31 perplexity 175.05
eval: bucket 0 perplexity 78.37
eval: bucket 1 perplexity 119.72
eval: bucket 2 perplexity 169.11
eval: bucket 3 perplexity 202.89
global step 1000 learning rate 0.4173 step-time 15.85 perplexity 174.33
eval: bucket 0 perplexity 76.52
eval: bucket 1 perplexity 125.97
eval: bucket 2 perplexity 150.13
eval: bucket 3 perplexity 181.07
...
After training the model for 350000 steps, you can play with the translation by switch
main_train() to main_decode(). You type in a English sentence, the program will outputs
a French sentence.
Reading model parameters from wmt/translate.ckpt-350000
> Who is the president of the United States?
Qui est le président des États-Unis ?
Understand Translation¶
Seq2seq¶
Sequence to sequence model is commonly be used to translate a language to another. Actually it can do many thing you can’t imagine, we can translate a long sentence into short and simple sentence, for example, translation going from Shakespeare to modern English. With CNN, we can also translate a video into a sentence, i.e. video captioning.
If you just want to use Seq2seq but not going to design a new algorithm, the only think you need to consider is the data format including how to split the words, how to tokenize the words etc. In this tutorial, we described a lot about data formating.
Basics¶
Sequence to sequence model is a type of “Many to many” but different with Synced sequence input and output in PTB tutorial. Seq2seq generates sequence output after feeding all sequence inputs. The following two methods can improve the accuracy:
- Reversing the inputs
- Attention mechanism
To speed up the computation, we used:
- Sampled softmax
Karpathy’s blog described Seq2seq as: “(4) Sequence input and sequence output (e.g. Machine Translation: an RNN reads a sentence in English and then outputs a sentence in French).”
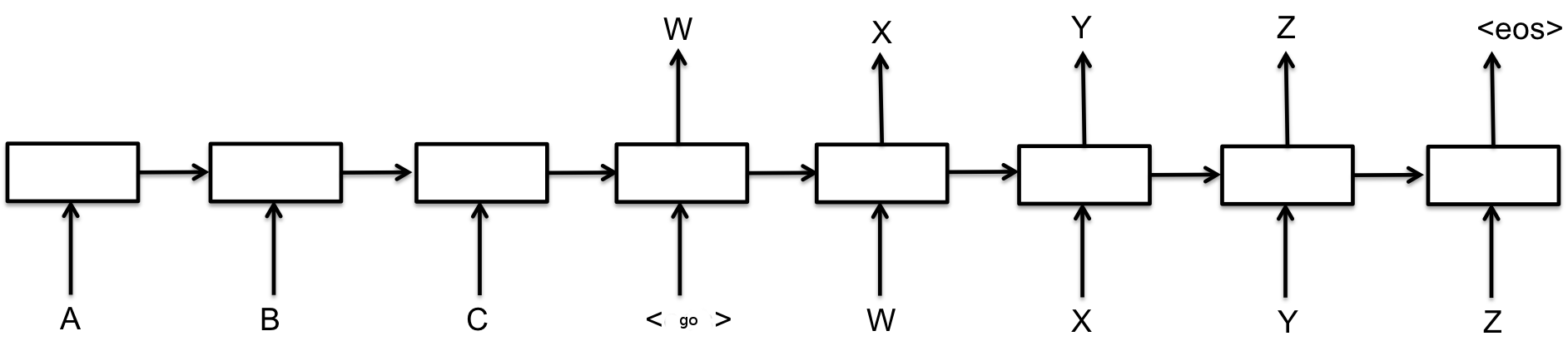
As the above figure shows, the encoder inputs, decoder inputs and targets are:
encoder_input = A B C
decoder_input = <go> W X Y Z
targets = W X Y Z <eos>
Note: in the code, the size of targets is one smaller than the size
of decoder_input, not like this figure. More details will be show later.
Papers¶
The English-to-French example implements a multi-layer recurrent neural network as encoder, and an Attention-based decoder. It is the same as the model described in this paper:
The example uses sampled softmax to handle large output vocabulary size.
In this example, as target_vocab_size=4000, for vocabularies smaller
than 512, it might be a better idea to just use a standard softmax loss.
Sampled softmax is described in Section 3 of the this paper:
Reversing the inputs and Multi-layer cells have been successfully used in sequence-to-sequence models for translation has beed described in this paper:
Attention mechanism allows the decoder more direct access to the input, it was described in this paper:
Alternatively, the model can also be implemented by a single-layer version, but with Bi-directional encoder, was presented in this paper:
Implementation¶
Bucketing and Padding¶
(Note that, TensorLayer supports Dynamic RNN layer after v1.2, so bucketing is not longer necessary in many cases)
Bucketing is a method to efficiently handle sentences of different length.
When translating English to French, we will have English sentences of
different lengths L1 on input, and French sentences of different
lengths L2 on output. We should in principle create a seq2seq model
for every pair (L1, L2+1) (prefixed by a GO symbol) of
lengths of an English and French sentence.
To minimize the number of buckets and find the closest bucket for each pair, then we could just pad every sentence with a special PAD symbol in the end if the bucket is bigger than the sentence
We use a number of buckets and pad to the closest one for efficiency. In this example, we used 4 buckets as follow.
buckets = [(5, 10), (10, 15), (20, 25), (40, 50)]
If the input is an English sentence with 3 tokens, and the corresponding
output is a French sentence with 6 tokens, then they will be put in the
first bucket and padded to length 5 for encoder inputs (English sentence),
and length 10 for decoder inputs.
If we have an English sentence with 8 tokens and the corresponding French
sentence has 18 tokens, then they will be fit into (20, 25) bucket.
In other word, bucket (I, O) is (encoder_input_size, decoder_inputs_size).
Given a pair of [["I", "go", "."], ["Je", "vais", "."]] in tokenized format,
we fit it into bucket (5, 10).
The training data of encoder inputs representing [PAD PAD "." "go" "I"]
and decoder inputs [GO "Je" "vais" "." EOS PAD PAD PAD PAD PAD]. The targets
are decoder inputs shifted by one. The target_weights is the mask of
targets.
bucket = (I, O) = (5, 10)
encoder_inputs = [PAD PAD "." "go" "I"] <-- 5 x batch_size
decoder_inputs = [GO "Je" "vais" "." EOS PAD PAD PAD PAD PAD] <-- 10 x batch_size
target_weights = [1 1 1 1 0 0 0 0 0 0 0] <-- 10 x batch_size
targets = ["Je" "vais" "." EOS PAD PAD PAD PAD PAD] <-- 9 x batch_size
In this example, one sentence is represented by one column, so assume
batch_size = 3, bucket = (5, 10) the training data will look like:
encoder_inputs decoder_inputs target_weights targets
0 0 0 1 1 1 1 1 1 87 71 16748
0 0 0 87 71 16748 1 1 1 2 3 14195
0 0 0 2 3 14195 0 1 1 0 2 2
0 0 3233 0 2 2 0 0 0 0 0 0
3 698 4061 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0
where 0 : _PAD 1 : _GO 2 : _EOS 3 : _UNK
During training, the decoder inputs are the targets, while during prediction, the next decoder input is the last decoder output.
Special vocabulary symbols, punctuations and digits¶
The special vocabulary symbols in this example are:
_PAD = b"_PAD"
_GO = b"_GO"
_EOS = b"_EOS"
_UNK = b"_UNK"
PAD_ID = 0 <-- index (row number) in vocabulary
GO_ID = 1
EOS_ID = 2
UNK_ID = 3
_START_VOCAB = [_PAD, _GO, _EOS, _UNK]
ID MEANINGS
_PAD 0 Padding, empty word
_GO 1 1st element of decoder_inputs
_EOS 2 End of Sentence of targets
_UNK 3 Unknown word, words do not exist in vocabulary will be marked as 3
For digits, the normalize_digits of creating vocabularies and tokenized dataset
must be consistent, if normalize_digits=True all digits will be replaced by 0. Like
123 to 000`, 9 to 0 and 1990-05 to 0000-00, then 000, 0 and
0000-00 etc will be the words in the vocabulary (see vocab40000.en).
Otherwise, if normalize_digits=False, different digits
will be seem in the vocabulary, then the vocabulary size will be very big.
The regular expression to find digits is _DIGIT_RE = re.compile(br"\d").
(see tl.nlp.create_vocabulary() and tl.nlp.data_to_token_ids())
For word split, the regular expression is
_WORD_SPLIT = re.compile(b"([.,!?\"':;)(])"), this means use the symbols like
[ . , ! ? " ' : ; ) ( ] and space to split the sentence, see
tl.nlp.basic_tokenizer() which is the default tokenizer of
tl.nlp.create_vocabulary() and tl.nlp.data_to_token_ids().
All punctuation marks, such as . , ) ( are all reserved in the vocabularies
of both English and French.
Sampled softmax¶
Sampled softmax is a method to reduce the computation of cost so as to
handle large output vocabulary. Instead of compute the cross-entropy of large
output, we compute the loss from samples of num_samples.
Dataset iteration¶
The iteration is done by EmbeddingAttentionSeq2seqWrapper.get_batch, which get a random batch of data
from the specified bucket, prepare for step. The data
Loss and update expressions¶
The EmbeddingAttentionSeq2seqWrapper has built in SGD optimizer.
What Next?¶
Try other applications.
More info¶
For more information on what you can do with TensorLayer, just continue reading through readthedocs. Finally, the reference lists and explains as follow.
layers (tensorlayer.layers),
activation (tensorlayer.activation),
natural language processing (tensorlayer.nlp),
reinforcement learning (tensorlayer.rein),
cost expressions and regularizers (tensorlayer.cost),
load and save files (tensorlayer.files),
operating system (tensorlayer.ops),
helper functions (tensorlayer.utils),
visualization (tensorlayer.visualize),
iteration functions (tensorlayer.iterate),
preprocessing functions (tensorlayer.prepro),